Следует ознакомиться с несколькими ключевыми терминами: заданное значение, ошибка, контур управления и время цикла.
Желаемая скорость вращения называется установкой. Ошибка — это разница между установкой (насколько быстро мы хотим, чтобы двигался БПЛА) и измерением гироскопического датчика (насколько быстро движется БПЛА на самом деле).
Основная цель ПИД-контроллера в квадрокоптере — исправить ошибку путем регулировки скорости двигателя. Контур управления непрерывно считывает данные датчиков и вычисляет скорость двигателя, чтобы минимизировать ошибку. Betaflight может выполнять до 8000 циклов управления в секунду (установив частоту ПИД-контура на 8 кГц в программном обеспечении).
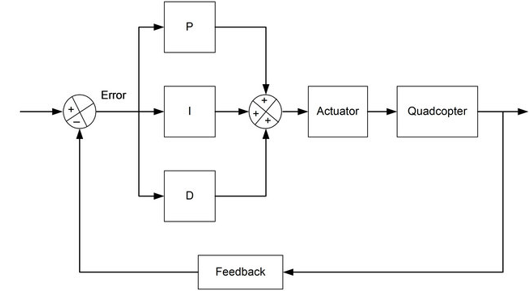
Алгоритм ПИД является важнейшей частью системы управления.
- P (пропорция) относится к текущей ошибке. Чем больше ошибка, тем сильнее она давит – в математическом смысле, она пропорциональна ошибке.
- D (дифференциал) предсказывает будущую ошибку. Она учитывает, насколько быстро достигается заданное значение, и противодействует P, чтобы минимизировать перерегулирование при приближении к цели – в математическом выражении это производная ошибки.
- I (интеграл) накапливает прошлые ошибки. Он учитывает внешние силы, которые возникают со временем, например, квадрокоптер, отклоняющийся от заданной точки из-за ветра или смещенного веса, регулируя скорость двигателя для противодействия этому — в математическом выражении это интеграл ошибки.
Можно назначить коэффициент усиления каждому члену, причем более высокий коэффициент усиления увеличивает влияние члена на характеристики полета.
Эти принципы применимы к любой прошивке контроллера полета, использующей ПИД-регулятор, например Betaflight, Ardupilot, KISS, iNAV, EmuFlight, Baseflight и т. д.
Цель настройки ПИД
Цель настройки PID — добиться идеального соотношения управления двигателями для стабилизации квадрокоптера в пространстве в условиях воздействия внешних факторов. При правильной настройке ваш квадрокоптер будет точно отслеживать внешние воздействия, обеспечивая хорошую управляемость без колебанийи вибраций.
P усиление
Коэффициент усиления P определяет интенсивность, с которой контроллер полета работает над исправлением ошибок.
Рассматривайте усиление P как настройку отзывчивости. Высокое усиление P создает мгновенный ответ, создавая ощущение, что ваши показатели возросли.
Если усиление P слишком велико, квадрокоптер имеет тенденцию к чрезмерной коррекции, что приводит к резким отскокам назад во время переворотов и кренов. Чрезмерно высокое усиление P может даже вызвать колебания. И наоборот, если усиление P слишком мало, квадрокоптер кажется замедленным и медленно реагирует.
I усиление
Думайте об усилении I как о настройке жесткости, оно определяет усилия контроллера полета по поддержанию положения дрона против внешних сил, таких как ветер и смещенный центр тяжести. Хорошее значение усиления I предотвратит дрон от дрейфа.
Подобно усилению P, чрезмерное усиление I может вызывать отскоки и колебания, хотя и с заметно меньшей скоростью (более низкая частота). Если усиление I слишком низкое, квадрокоптер будет испытывать колебания и «ныряние носом» во время быстрых изменений дроссельной заслонки. Чрезвычайно низкое усиление I приводит к плохому удержанию угла в ветреную погоду, из-за чего дрон кажется дрейфующим и требует постоянного вмешательства пилота для коррекции.
Коэффициент усиления P может гасить колебания, вызванные коэффициентом усиления I, поэтому между коэффициентами усиления P и I должно соблюдаться определенное соотношение.
D усиление
Коэффициент усиления D действует как демпфер для коэффициента усиления P, уменьшая вызванные им перерегулирования. Подобно тому, как амортизатор гасит отскок подвески, коэффициент усиления D смягчает и противодействует колебаниям, вызванным чрезмерным коэффициентом усиления P, и минимизирует колебания от обтекания пропеллера.
Если коэффициент усиления D слишком мал, квадрокоптер будет демонстрировать значительные отскоки назад после переворотов и кренов, а также испытывать более сильные колебания от пропеллеров во время вертикальных снижений.
Увеличение усиления D может смягчить эти проблемы; однако чрезмерное усиление D может усилить вибрации и шум в квадрокоптере, вызывая дрожащие колебания и перегрев двигателя.
Прямая связь (Feedforward)
Коэффициент усиления P является основным элементом управления квадрокоптера, но зачастую он недостаточно быстр, поскольку реагирует только на ошибки, создавая задержку между заданным значением и гироскопом.
Feedforward направлен на сокращение этой задержки. По сути, контроллер полета отслеживает, как быстро вы перемещаете ручку, и помогает инициировать движение квадрокоптера раньше, не полагаясь на данные гироскопа. Это может значительно улучшить отслеживание заданных значений. Однако слишком высокая настройка Feedforward может привести к отскокам в конце переворотов и кренов, аналогично чрезмерному усилению P.
Факторы, влияющие на оптимальный ПИД
Каждый квадрокоптер будет иметь уникальные оптимальные значения ПИД, на которые влияют различные факторы, включая:
1. Общий вес и распределение веса
2. Тяга двигателей
3. Крутящий момент двигателя, который влияет на скорость изменения оборотов.
4. Вес и шаг винта, влияющие на реакцию двигателя
Ни одна настройка ПИД не является универсально идеальной. Например, аварии могут слегка повредить пропеллеры, рамы или двигатели, изменив резонансную частоту и оптимальные значения ПИД. Кроме того, размещение батареи может повлиять на распределение массы. В идеале нужно точно настроить параметры ПИД, чтобы они соответствовали широкому диапазону ситуаций.
Меры предосторожности перед настройкой ПИД
Прежде чем приступить к внесению каких-либо изменений в настройки ПИД-регулятора, выполните следующие действия, чтобы обеспечить плавный процесс настройки:
1. Резервное копирование текущих значений PID: это позволяет вернуться к предыдущим настройкам, если что-то пойдет не так в процессе настройки.
2. Всегда настраивайте свой квадрокоптер в режиме Acro : это обеспечивает точную настройку без помех со стороны функций автоматического выравнивания.
3. Сбалансируйте центр тяжести (ЦТ) вашего квадрокоптера, правильный ЦТ значительно влияет на летные характеристики. Отрегулируйте размещение батареи, чтобы сместить ЦТ вперед или назад, пока он не будет отцентрирован.
Упрощенный процесс настройки
Основная идея этого упрощенного процесса настройки заключается в поиске оптимальных соотношений между коэффициентами усиления P, I и D. Этого можно достичь, выполнив следующие шаги:
1. Найдите хороший баланс между приростами P и D.
2. Определите правильное соотношение между коэффициентами усиления P и I.
3. Увеличьте все коэффициенты усиления ПИД-регулятора.
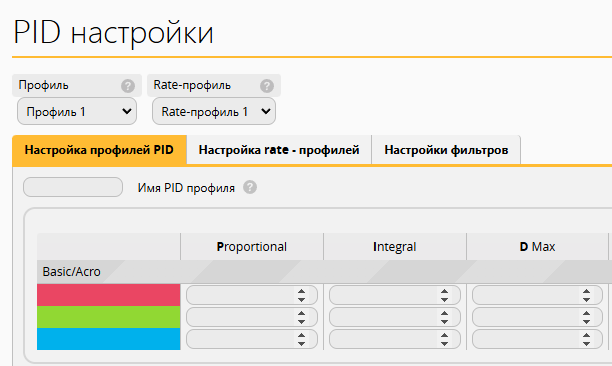
Вы можете легко настроить эти параметры с помощью ползунков в Betaflight, что устраняет необходимость вводить числа вручную.
Хотя идеально настраивать значения PID с помощью журналов Blackbox, все равно можно добиться достойных результатов, внимательно наблюдая за поведением полета вашего дрона через очки FPV и слушая звуки мотора. Но если нужно настроить квадрокоптер настолько идеально, насколько это возможно, используйте Blackbox.
Настройка Tiny Whoops
Для whoops переключитесь в режим RP на вкладке настройки PID, чтобы можно было отдельно задать Yaw PID. Крошечные whoops, как правило, имеют небольшое рыскание от воздушных потоков, поэтому нужно установить их высоким. Установите Yaw P и I на 100.
Помните, не все проблемы связаны с PID
Хотя настройка PID играет важную роль в производительности квадрокоптера, важно понимать, что на нее также могут влиять аппаратные факторы. Прежде чем менять значения PID при проблемах с производительностью, проверьте следующие характеристики вашего квадрокоптера:
Вибрация
Не все колебания вызваны слишком высоким коэффициентом усиления ПИД. Крайне важно устранить как можно больше источников вибрации в квадрокоптере перед настройкой ПИД. Факторы, способствующие вибрации, включают состояние двигателя и пропеллера, правильное мягкое крепление контроллеров полета и жесткость рамы.
Центр тяжести
В идеале центр тяжести вашего квадрокоптера должен находиться точно посередине, где четыре двигателя пересекаются в горизонтальной плоскости, и как можно ближе к линии пропеллеров в вертикальной плоскости.
Смещенный центр тяжести приводит к тому, что некоторые двигатели работают интенсивнее, чем другие, что отрицательно сказывается на устойчивости.
Распределение массы и момент инерции
Квадрокоптеры с сбалансированным центром масс кажутся более точными, резкими и отзывчивыми. Когда на внешней стороне квадрокоптера больше массы, требуется больше силы для вращения и больше времени для разгона до желаемой скорости. Из-за большей угловой массы и инерции остановка вращения также становится более сложной.
Когда следует перенастраивать ПИД?
Вносите изменения в конструкцию квадрокоптера? Возможно, придется пересмотреть настройки ПИД.
На настройку ПИД могут влиять различные факторы, например, использование другого аккумулятора, добавление камеры, навесного оборудования, использование других двигателей и пропеллеров или даже внешние факторы, такие как ветер, влажность и высота над уровнем моря.
По сути, всякий раз, когда вы вносите существенные изменения в свой квадрокоптер, хорошей идеей будет проверить и при необходимости скорректировать значения ПИД.